Publications
publications by categories in reversed chronological order. generated by jekyll-scholar.
2025
2024
-
 Quantifying Agent Interaction in Multi-agent Reinforcement Learning for Cost-efficient GeneralizationIn Reinforcement Learning Conference (RLC), 2024Preliminary version was presented as an extended abstract at 2024 International Conference on Autonomous Agents and Multi-agent Systems (AAMAS)
Quantifying Agent Interaction in Multi-agent Reinforcement Learning for Cost-efficient GeneralizationIn Reinforcement Learning Conference (RLC), 2024Preliminary version was presented as an extended abstract at 2024 International Conference on Autonomous Agents and Multi-agent Systems (AAMAS)
2023
-
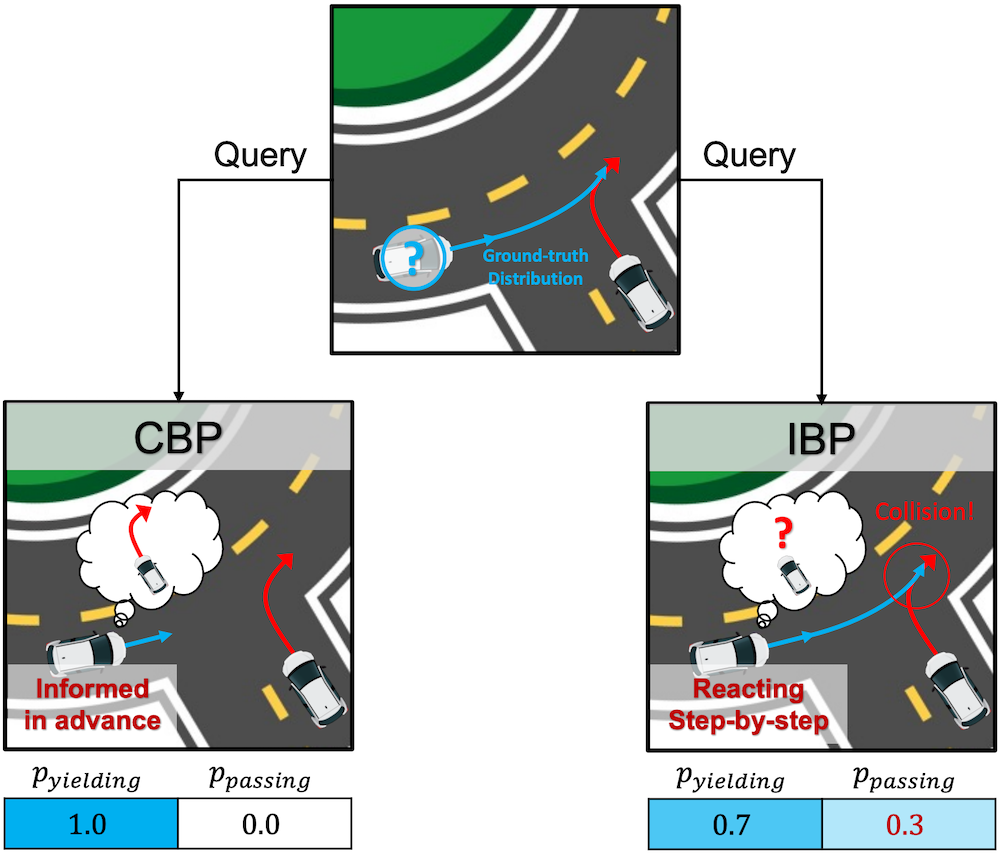
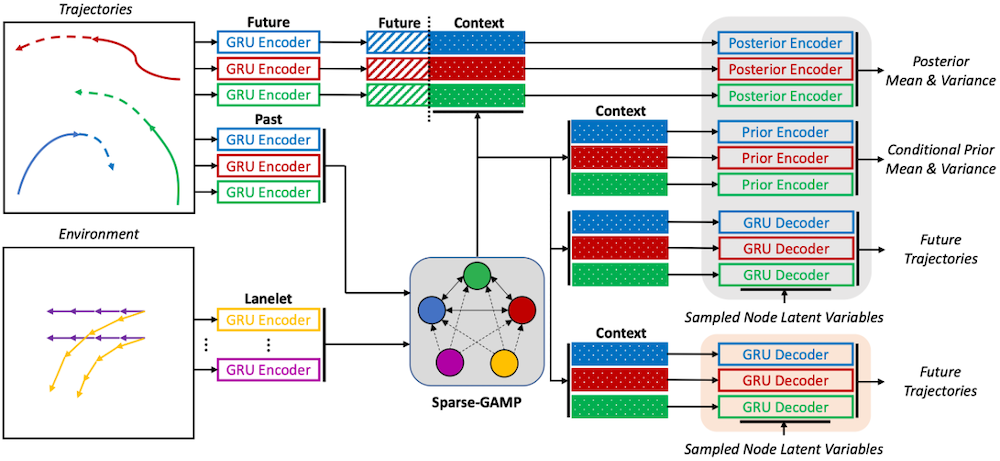
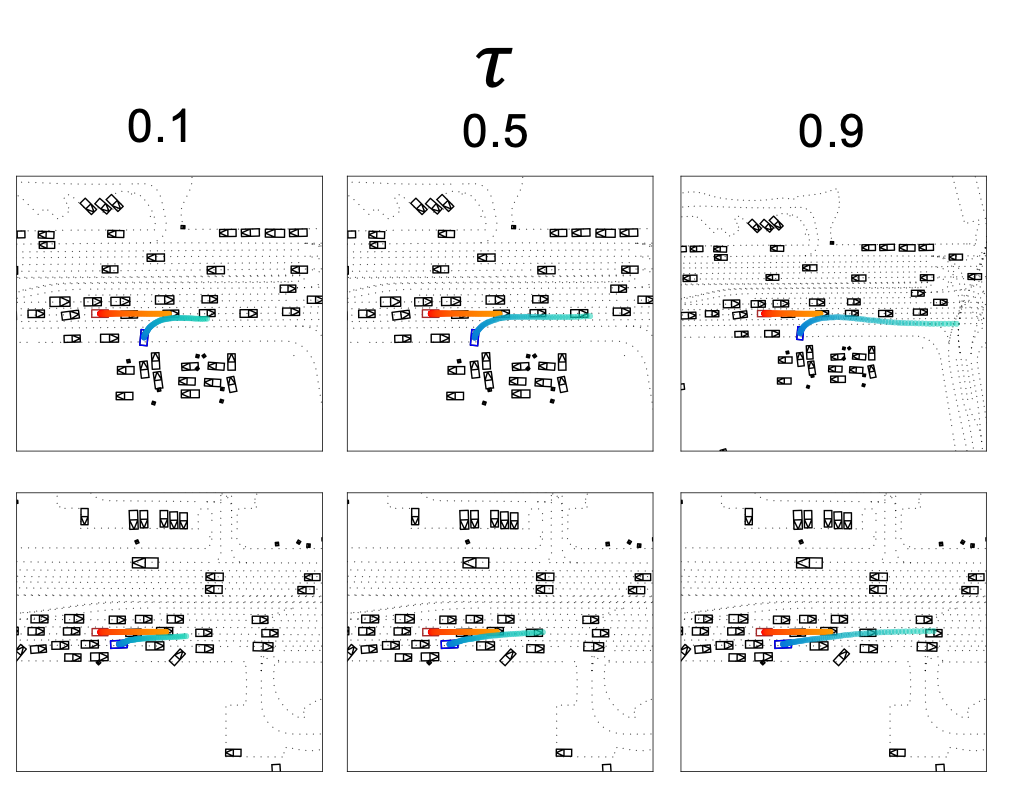 Editing Driver Character: Socially-Controllable Behavior Generation for Interactive Traffic SimulationIEEE Robotics and Automation Letters (RA-L), 2023presented at 2023 CVPR Workshop on Multi-Agent Behavior: Properties, Computation, and Emergence (MABe) and 2024 IEEE International Conference on Robotics and Automation (ICRA)
Editing Driver Character: Socially-Controllable Behavior Generation for Interactive Traffic SimulationIEEE Robotics and Automation Letters (RA-L), 2023presented at 2023 CVPR Workshop on Multi-Agent Behavior: Properties, Computation, and Emergence (MABe) and 2024 IEEE International Conference on Robotics and Automation (ICRA)